




El circuito que proponemos posibilita el control térmico de cualquier ambiente, manteniendo la temperatura en una determinada faja de valores, pudiendo ser usado en estufas, cámaras de secado, incubadoras electrónicas, salas de computadoras, salas de estar o reuniones, sistemas de refrigeración de máquinas etc. Se trata de un verdadero montaje de electrónica industrial.
Mantener la temperatura de un determinado ambiente en una faja establecida previamente es un problema que puede resolverse con eficiencia si usamos, recursos electrónicos. ¿Pero cuáles han de ser estos recursos?
En primer lugar precisamos de un sensor eficiente que pueda percibir con cierta rapidez (pequeña inercia térmica) cualquier variación de la temperatura controlada. Después precisamos de los recursos que puedan corregir las alteraciones de temperatura, como por ejemplo un sistema de calentamiento si la temperatura cae por debajo de cierto valor, o de refrigeración si sube más allá de cierto valor.
En los casos en que la faja controlada tuviera limites más allá de las variaciones normales de la temperatura ambiente, precisaremos de los dos controles: calentamiento y enfriamiento. Ese tipo de sistema es el que, evidentemente, presenta mayores problemas y dificultades de proyectar.
Si la temperatura que queremos controlar supera un determinado valor pre-ajustado, nuestro aparato debe desconectar el sistema de calefacción, para que la misma vuelva normalmente a caer. Si el valor pre-ajustado fuera, empero, inferior a la temperatura ambiente en un determinado instante del día, incluso aunque desconectemos el sistema de calefacción la temperatura no disminuirá, debido a la tendencia a igualarse con el ambiente.
Se hace necesario en este caso el uso de un sistema de refrigeración forzada, conectando por ejemplo un acondicionador de aire o simplemente un ventilador. EI mismo modo, si la temperatura a controlar cae por debajo de un valor prefijado, y éste fuera superior a la temperatura ambiente, la simple desconexión de un equipo de refrigeración no permite que a través de un intercambio de calor espontáneo el sistema vuelva a su temperatura normal, por lo que habrá necesidad de activar un calentamiento forzado.
Así, con una faja de temperatura de control en los limites internos de una faja más amplia de temperaturas ambientes normales, se hace necesario el control doble. Tenemos entonces que disponer tanto de un sistema que dispare con sobre-temperaturas como con sub-temperaturas, activando en un caso Ia refrigeración y en otro la calefacción (figura 1).

El sistema que proponemos en este artículo hace justamente eso, usando un único sensor y con posibilidad de ajustarlo para dos temperaturas diferentes, tanto en el paso por el limite superior como en el paso por el limite inferior.
Las características del aparato son:
Corriente de control de la carga: 2A (posible ampliación)
Sensores usados: NTC o transistor
Faja de temperaturas de operación: -259C a +125ºC
Tensión de alimentación: 110/22oVCA ó 12VDC
Número de integrados: 3
Como funciona
Se usan dos comparadores de tensión con amplificadores operacionales del tipo 741.
En estos comparadores tenemos dos entradas, una inversora y la otra no inversora, representadas por "-" y "+". Podemos entonces tener dos modalidades de funcionamiento:
a) Si aplicamos una tensión de referencia en la entrada inversora, dada por el divisor resistivo R1 - R2 en la figura 2, la tensión de salida podrá variar entre 0V y 12V, aproximadamente en las siguientes condiciones: cuando Ia tensión aplicada en la entrada no inversora (venida del sensor) fuera menor que la tensión de referencia, la tensión de salida será prácticamente nula.

Por otro lado, cuando la tensión en la entrada no inversora tuera mayor que la tensión de referencia, la tensión de salida será prácticamente 12V. La transición entre esas dos tensiones se hace de modo bien acentuado dado la elevada ganancia del amplificador operacional, del orden de 100.000 veces.
En la salida de un operacional conectado de esta forma, si acoplamos un driver PNP su conducción ocurrirá justamente cuando la tensión estuviera próxima de cero.
Así, en esta configuración el transistor de salida conducirá, activando el relé, cuando la tensión proporcionada por el sensor fuera menor que la tensión de referencia.
Teniendo en cuenta que un sensor conectado de la forma mostrada en la figura 2, con coeficiente negativo de temperatura, hace caer la tensión de entrada cuando la temperatura sube, este circuito opera como un disparo por sobre-temperatura.
b) En esta modalidad, aplicamos la tensión de referencia en la entrada no inversora (+) y la tensión del sensor en la entrada inversora.
Igualmente, dada la ganancia del amplificador operacional, tenemos una transición muy rápida en su salida, cuando un valor supera al otro.
Así, cuando la tensión de la entrada inversora (sensor) supera a la de referencia, la tensión de salida caerá a cero, como muestra el gráfico de la figura 3.

Como también conectamos en la salida un driver tipo PNP, la conducción de este transistor ocurre cuando la tensión cae a cero, lo que quiere decir que tendremos un disparo por sub-temperatura, considerando nuevamente la conexión del sensor con coeficiente negativo de temperatura (NTC).
En el proyecto final tenemos la fijación de los puntos de disparo por el ajuste de la tensión de los terminales de referencia en determinadas temperaturas a través de trimpots.
El sensor puede ser tanto un transistor común, aprovechándose de su corriente de fuga (logo) que depende de la temperatura como parámetro principal, como también un NTC.
Lo importante al elegir el sensor es llevar la tensión en el divisor formado por R2 y P2 a un valor próximo de la mitad de la alimentación (GV), en las condiciones medias de operación (temperatura normal).
Ajustamos entonces las tensiones de referencia arriba o debajo de ésta, según los puntos de disparo.
Un factor importante en la operación de este tipo de circuito es la llamada inercia térmica.
Una vez que la temperatura varia en el ambiente, el circuito no responde de inmediato, pues el sensor precisa de un cierto tiempo para equilibrar su propia temperatura. La velocidad con que ocurre el equilibrio depende del tamaño del sensor, o sea, de su "capacidad térmica".
Para un sensor termométrico, como muestra la figura 4, en que la capacidad térmica es muy pequeña, la reacción es casi instantánea, pero para un transistor o incluso un NTC, precisamos hasta algunos minutos para esto.

Lo importante en las aplicaciones en que se exige un control más rápido es que el sensor sea montado en un lugar que permita la detección rápida de cualquier variación de temperatura.
Para los NTCs no será necesario utilizar el amplificador, dada su mayor variación de temperatura.
De cualquier forma siempre es importante conocer la curva de variación de la resistencia del componente con la temperatura para que se haga un ajuste correcto del sistema.
Montaje
En la figura 5 tenemos el diagrama completo del aparato, incluyendo Ia fuente de alimentación.

En el caso de que el aparato sea alimentado por batería, el sector de la fuente puede ser eliminado, pero si necesitara precisión de funcionamiento recomendamos una versión reductora, como muestra la figura 6.

La placa de circuito impreso para este montaje es la que aparece en la figura 7.

Los resistores son todos de 1/8 o 1/4W con 10% o 20% de tolerancia, y los relés así como los integrados son montados en zócalos DIL de 8 y 16 pinos.
Los diodos de protección y conmutación pueden ser 1N914 o 1N4148.
EI sensor puede ser un NTC con resistencia entre 1k y 10k, caso en que tendremos la alteración de P2 y R2 para 10k y 470 ohm respectivamente o bien un transistor de germanio (2SB75, AC188, etc.) pues estos presentan una variación mayor de la corriente de fuga lCEO con la temperatura.
Los trimpots son comunes, y el capacitor de filtro de la fuente tiene una tensión de trabajo de 25V.
EI transformador debe ser de 500 mA a M, ya que los relés que exigen la mayor corriente, disparan con 100 mA o más.
Para el control externo podemos prever tanto Ia colocación de tomas como una barra de terminales con tornillos.
En la figura 8 mostramos la conexión en un control doble en el que tenemos el accionamiento de un ventilador cuando la temperatura supera cierto valor y el accionamiento de un calentador cuando la misma cae por debajo de determinado valor.

Para el sensor se puede prever una conexión remota a través de un enchufe, y se debe emplear un cable blindado si el mismo queda a más de 5 metros del aparato de control.
EI fusible de protección en la entrada tiene su corriente elegida de acuerdo con los aparatos controlados, siendo los SA recomendados para la carga máxima.
Prueba y uso
Para ajustar y probar el control, el lector precisará de un multímetro conectado en la escala de tensiones continuas (volts DC) que permita leer 6V.
Conecte el aparato y ajuste P2 para leer una tensión de 6V en el punto indicado en el diagrama (entrada de tensión de los comparadores a partir del sensor).
EI sensor debe estar inicialmente en la temperatura ambiente.
Gire entonces P1 y verifique si existe un punto de transición en que el relé conmuta (abre o cierra). Haga Io mismo con P3.
Con este procedimiento comprobamos el funcionamiento de los dos comparadores, sus drivers y los relés.
Para ajustar el aparato, coloque P1 en el punto que corresponde al disparo en temperatura más alta.
Para eso, coloque el sensor en lugar de temperatura conocida (más alta) en que debe ocurrir el disparo y ajuste Pt para eso.
Después, coloque el sensor en un lugar de temperatura mínima de disparo y ajuste P3 para que el relé K2 actúe.
Hechos los ajustes de los extremos de actuación sólo falta hacer la instalación del sensor en el lugar a ser controlado y conectar las salidas a los controladores (ventiladores, calentadores, etc.).
Para una incubadora, donde la temperatura debe ser mantenida en valores elevados, 38% por ejemplo, el sistema de refrigeración puede no ser necesario, usando sólo el calentador, que será conectado en sub-temperatura (K2) como muestra la figura 9.

Este calentador puede ser una lámpara de 100 watt o incluso de alambre de nicromo para 200 watt.
Sensores LM35/LM35A/LM35C/LM35CA/LM35D
National Semiconductor posee en su línea de componentes los sensores de temperatura para la taja de grados centígrados indicados por los tipos que aparecen más arriba.
La principal característica de estos integrados es la de proporcionar una salida, cuya tensión es linealmente proporcional a la temperatura en la fala de -55ºC a +150ºC.
En la figura 10 tenemos las cubiertas de estos componentes.

Las características principales de estos sensores son:
Tensiones máximas de alimentación: -O,2V a +35V
Tensiones de salida: -1,0V a +6,0V(máx.)'
Corriente de salida máxima: 10mA
Faja de temperaturas de operación: LM35, LM35A: -55ºC a +150ºC LM35C, LM35CA: -40ºC +110ºC LM3SD: 0ºC a +100ºC
Precisión típica a 25ºC: 0,2ºC
Ganancia típica del sensor: +10,0mV/ºC.
En la figura 11 tenemos circuitos típicos de aplicación proporcionados por el fabricante.
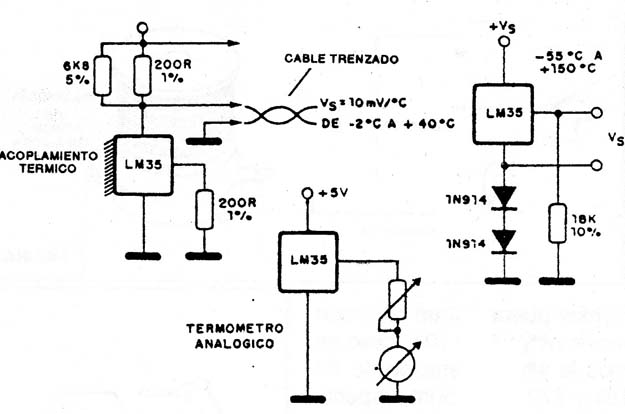
Con el cambio de los resistores R4 y R6 por otros de 1k, y la conexión directa de la salida de los sensores al punto de 6V, sin la utilización de R2, P2 y demás componentes, estos sensores estarán aptos para operar en nuestro circuito.
Cl-1, Cl-2 - LM 741 - amplificadores operacionales
CI-3 - 7812 - circuito integrado regulador de tensión
Q1 - sensor de germanio - ver texto
Q2 - BC548 - transistor NPN de uso general
Q3, 04 - BC558 - transistores PNP de uso general
D1, D2, DS, 06-1N4148 ó 1N914- diodos de silício de uso general
D3, D4 1N4004 ó equivalentes - diodos rectificadores
P1, P2, P3 - 100k - trimpots
K1, K2 - Microrrelés de 12 V
T1 - 15+15V x 500mA 6 M - transformador con primario de 22oV
C1 - 1.000 µF x 25V - capacitor electrolítico
R1 - 1k - resistor (marron, negro, rojo)
R2 - 4k7 - resistor (amarillo, violeta, rojo)
R3, R4, R5, R6 - 10k - resistores (marrón, negro, naranja)
R7, R8- 1k resistores (marron negro, rojo)
Varios: placa de circuito impreso, zócalos DIL para los integrados y relés, cable de alimentación, toma de salida (X1), soporte para fusibles, cable de conexión del sensor, etc.