




Los controles de velocidad para pequenos motores de corriente continua son partes importantes de diversos proyectos del área de la robótica, modelismo e incluso equipes para laboratórios. Existen muchos dispositivos desarrollados en laboratorios de investigación que hacen uso de pequeños motores, pero los mismas exigen controles de velocidad eficientes y hasta capaces de hacer la reversión de su rotación. En este artículo, con miras a la utilización tanto de motores comunes como de los dotados de cajas de reducción, abordamos diversos circuitos de controles de velocidad de gran utilidad.
La forma más simple de controlar la velocidad de un pequeño motor de corriente continua consiste en conectar en serie com este motor un resistor variable (reóstato), de tal forma que podamos alterar la comente circulante en una cierta banda de valores, como sugiere la figura 1.
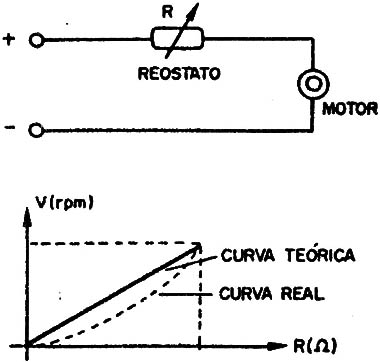
Sin embargo, por las propias características del motor, y también de la conexión, este circuito presenta algunas desventajas que merecen ser analizadas. Una reside en el hecho que, formando un divisor de tensión con el motor, el reóstato disipa potencia que, en la condición más desfavorable, llega a ser la misma absorbida por el motor.
Esto significa que, para motores de alguna potencia, precisamos no sólo utilizar reóstatos de alambre, con buena capacidad de disipación, sino también tenemos que considerar la perdida de energía en la forma de calor, lo que en alimentaciones por batería debe ser evitado.
Otro hecho que perjudica la eficiencia de este tipo de control es la alinealidad de características de un motor de comente continua típico. Estos pequeños motores, como muestra la figura 2, presentan una impedancia que dependerá de su velocidad y de la carga movida.
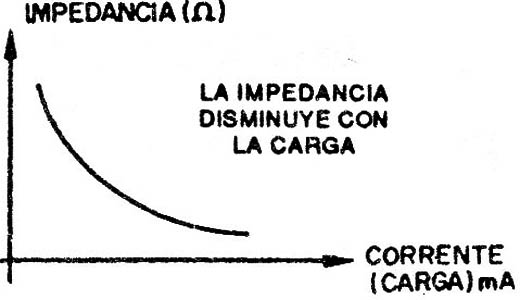
Así, girando "en vacio", su resistencia es mucho más alta que cuando está ”cargado", y del mismo modo, en una condición de baja velocidad, su resistencia es mayor que cuando está en alta velocidad (figura 2).
Esta alinealidad en un control del tipo reóstato vuelve difícil la obtención de una variación constante de la velocidad en todo el curso del reóstato. De hecho, en las bajas velocidades, la variación de la resistencia del motor en conjunto con la resistencia en serie hace que la rotación y el torque caigan rápidamente, llevando al motor a paradas bruscas o a no arrancar inclusive, si no bruscamente en cierto punto del ajuste, ya con buena velocidad.
Es evidente que, en ciertas aplicaciones que involucran el control crítico de movimientos (como en robótica y también en modelismo) este tipo de control no podrá usarse. Existem diversas técnicas que permiten superar estos dos problemas y de las cuales hablaremos en este artículo, presentando incluso circuitos sugeridos.
Otro punto importante que debe ser tenido en cuenta en la aplicación de los pequeños motores, es la necesidad de reducciones mecánicas, posibilitando el movimiento lento de piezas más críticas, lo que ocurre en modelismo o robótica. Un tipo de motor con caja de reducción aparece en la figura 3.
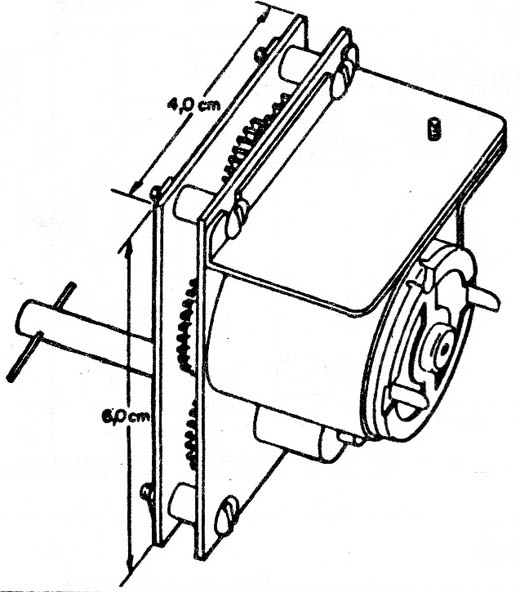
Los controles descriptos sirven perfectamente para esta caja de reducción y para motores con tensiones de alimentación de 3 a 12 V y corrientes que llegan a 1 A o más.
Reóstato con un Transistor
La manera más simple de hacer el control tipo reóstato, variando la resistencia en serie con un motor, pero sin necesitar un resistor variable de elevada disipación, es con un circuito del tipo mostrado en la figura 4.
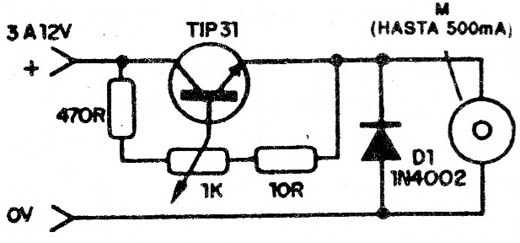
En este circuito, el transistor se comporta como resistencia variable, disipando la mayor parte de la potencia en las condiciones más desfavorables.
La resistencia que el transistor va a presentar entre el colector y el emisor, y por lo tanto la intensidad de la corriente en el motor que determina su velocidad, está dada por la polarización de base hecha por un potenciômetro de 1 k. Con una resistencia de 470 Ω en serie, tenemos una corriente máxima para la polarización, cerca de la saturación, bastante baja, lo que elimina la necesidad de un componente de alta disipación. El potenciômetro (P1) podrá ser del tipo común.
El diodo en paralelo con el motor tiene por finalidad evitar la alta tensión inversa que es generada por la conmutación de las escobillas del motor con características inductivas. Esta alta tensión podría ocasionar 1a quema del transistor en condiciones desfavorables.
En este circuito, el transistor Q1 debe ser dotado de un buen disipador de calor cuando se utilicen motores con tensiones de alimentación de 3 a 12 V y corrientes de hasta 500 mA. Evidentemente, no tenemos linealidad de los controles en las bajas velocidades, pues se trata de un reóstato electrónico.
Reóstato con Dos Transistores
En una configuración más elaborada, podemos tener dos transistores en la conexión Darlington a fin de utilizar corrientes todavía menores en un potenciômetro de control. Este es el circuito que aparece en la figura 5, que hace uso de un potenciómetro de 10 k o incluso menor.
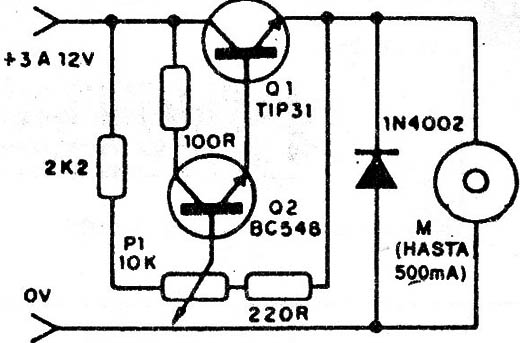
El principio de funcionamiento de este circuito es el mismo del anterior. El transistor Q1 se comporta como una resistencia variable en serie con el motor, determinando la intensidad de la corriente que circula por el circuito. Como la velocidad depende de esta corriente, variando la polarización en Q1, variamos también la velocidad del motor.
La polarización de base de Q1 está dada por la corriente del emisor de 92 que, a su vez, depende de la corriente de base dada por el ajuste del potenciômetro. Como la corriente de base del primer transistor es multiplicada prácticamente dos veces por las ganancias de los transistores para ser aplicada al motor, podemos usar un potenciômetro de control de muy baja disipación.
Control de Corriente Constante
Este circuito procura eliminar los problemas de variación de corriente de un motor a medida que el mismo gana velocidad, ya sea en vista de una superación de inercia de su carga, ya sea por otras características mecánicas del problema. De esta forma, podemos obtener una linealidad mayor de comportamiento, de manera diferente de la obtenida por un simple reóstato.
Lo que tenemos en la figura 6 es una fuente de corriente constante que tiene como base un circuito integrado regulador de tensión 7805 o incluso 7806.
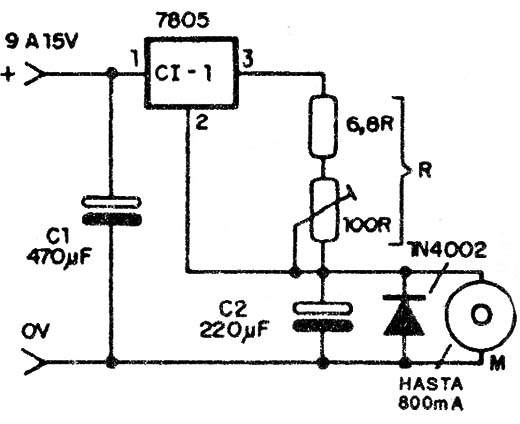
La intensidad de la corriente aplicada al motor depende de la tensión de referencia, dada por el integrado, y del resistor R, mostrado en el circuito.
La intensidad dela corriente será dada por:
I = 5/ R
donde:
I es la corriente en ampere
R es la resistencia en Ω
En el caso de 7806 será dada por
I = 6/ R.
Con un potenciômetro de 100 Ω en serie con un resistor de 6,8 ohm es fácil calcular la intensidad de comente en la salida de este sistema, que puede ser variada entre:
I0 : 5/6,8 : 735 mA
I1 = 5/ 106,8 : 46,8mA
Para una corriente mínima de menor valor, podemos aumentar el potenciômetro a 220 6 470 Ω. Con el segundo valor la corriente mínima obtenida será de 10 mA.
Para que este circuito funcione, la tensión en la entrada debe ser de por lo menos 7 V, en el caso del 7805 y de 8 V en el caso del 7806.
El integrado deberá ser montado en un disipador de calor y el capacitor C2 tiene por finalidad evitar oscilaciones del circuito que ocurren en vista de la presencia de la carga inductiva.
Una característica importante de este circuito puede ser analizada en el caso del control de motores que mueven cargas dotadas de cierta inercia. Cuando damos la partida en el motor, ajustándolo para una cierta velocidad, inicialmente su movimiento se hace lento, ganando velocidad a medida que la inercia de la carga va siendo vencida.
En un control por reóstato común, a medida que un motor en estas condiciones gana velocidad, su resistencia disminuye, y en consecuencia la corriente aplicada también, lo que significa que el mismo va perdiendo el torque, la tasa de aumento de 1a velocidad se vuelve menor al paso que nos acercamos al punto pre-ajustado.
En el control por corriente constante, cuando la velocidad del motor aumenta junto con su resistencia, la corriente no disminuye de intensidad, pero se mantiene constante gracias a la acción reguladora del circuito. Esto significa que la tasa de aumento de velocidad hasta el punto gráfico de la figura 7.
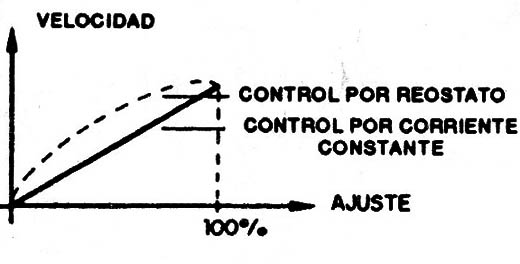
En otras palabras, podemos decir que este circuito consiste en un acelerador lineal de motores, lo que puede ser muy interesante en ciertas aplicaciones.
Control por Impulsos
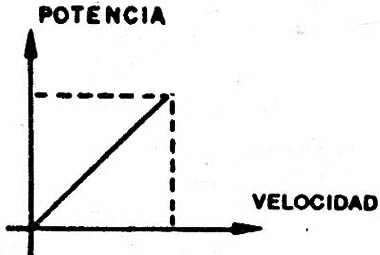
Los controles que vimos tienen también una desventaja en relación al torque, que depende del punto en que se hace el ajuste, o sea, 1a velocidad ajustada está dada por la reducción de la potencia aplicada al motor, lo que no siempre es conveniente (figura 8).
Un tipo de control más sofisticado es el que hace uso de impulsos de amplitud constante pero de relación marca/espacio dada por la velocidad que se desea obtener. Así, para una velocidad menor, lo que se hace es ajustar la duración de pulso a un valor mínimo. Con esto, incluso en la velocidad menor, la tensión aplicada al motor es máxima y, en consecuencia, la corriente también. En este corto intervalo de aplicación del pulso, la corriente es máxima y, por lo tanto, el torque se mantiene (figura 9).
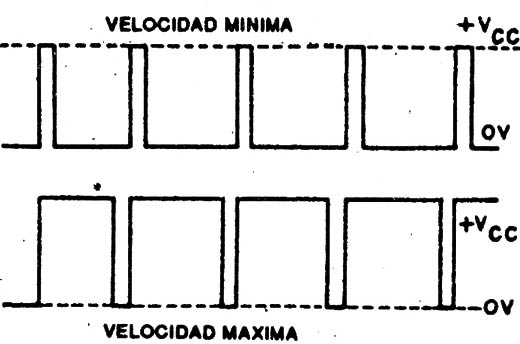
A medida que el ancho del pulso va aumentando, tenemos una potencia total aplicada mayor, que se mantiene hasta que alcanzamos el valor máximo que nos da toda la velocidad.
Una característica muy importante de este circuito es que el mismo posibilita la partida de los motores incluso en velocidades muy bajas pues, en el valor mínimo ajustado, tenemos la aplicación de pulsos de corta duración capaces de vencer fácilmente la inercia del sistema mecánico y hacer que gire el eje.
Con una caja de reducción como la ilustrada al comienzo de este artículo, conseguimos un control de este tipo de velocidades increíblemente bajas, como 1rpm, cuando el máximo se da con una velocidad de 40 a 50 rpm. Se trata de una variación lineal en una banda de más de 40 a 1!
Se trata, pues, del sistema ideal para quien desea un control lineal de velocidad en la mayor banda posible; El circuito propuesto se muestra en la figura 10.
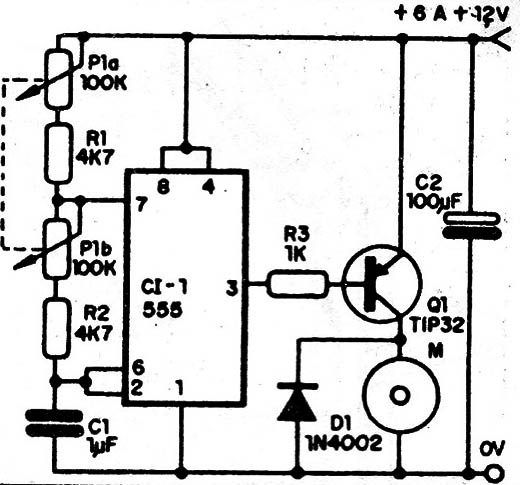
Tenemos un astable alrededor de un integrado 555, pero con una característica de control diferente. Las dos secciones de P1, un potenciômetro doble de 100 k, son conectadas de tal manera que, al girar el eje del componente, mientras la resistencia de una aumenta, la de la otra disminuye.
De esta forma, la resistencia total se mantiene constante y, con esto, la variación final de la frecuencia no es grande, ya que la fórmula nos dice que f = 1,45 (Ra + 2Rb) . C.
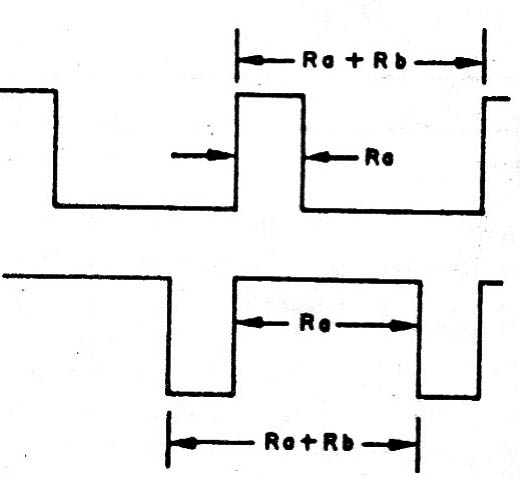
La variación de la frecuencia, conforme podemos percibir, es del orden de 2 a 1, según la expresión de arriba pero, en compensación, podemos variar la relación marca/espacio de la escala rectangular generada en una razón mejor que 20 a 1, lo que proporciona una banda de ajustes de velocidad muy grande, como muestran los gráficos de la figura 11.
La señal rectangular obtenida, con relación marca/espacio variable, es aplicada a la base de un transistor de potencia que controla la corriente aplicada al motor. Este transistor puede soportar corrientes del orden de 1 A, siempre que se lo dote de un disipador de calor. El sistema puede ser alimentado con tensiones entre 6 y 12 V.
El capacitor C1 es importante, pues determina las duraciones mínimas de los pulsos y la banda media de frecuencias.
Si usamos capacitores pequeños. la inductancia del bobinado del motor impide una respuesta rápida, dificultando el control en una banda de rotaciones. Del mismo modo, un valor excesivamente grande hace que los pulsos "aparezcan" en la forma de pequeños pasos adelante en el motor, que tiende a vibrar principalmente en las velocidades bajas.
Para la mayoría de los motores, según sus características, se debe experimentar con capacitores en la banda de 470 nF a 2,2 µF, incluso electrolíticos.
Control Pulsante con SCR
Una buena aproximación del comportamiento obtenido con el circuito anterior se puede conseguir con un control de fase con SCR en que, en lugar de ajustar el ancho de pulsos rectangulares, controlamos el ancho de pulsos senoidales cortados a partir de la propia red local. El circuito propuesto es el que se muestra en la figura 12.
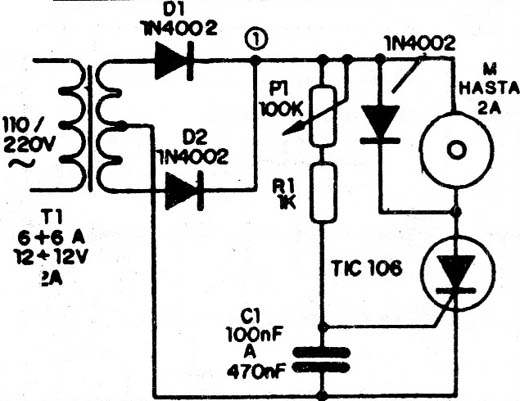
El potenciômetro en conjunto con el resistor de 1 k y el capacitor C1 retardan el punto de disparo del SCR en un semiciclo de alimentación y, con esto, determinan la parte de la potencia a ser aplicada en el motor.
Dependiendo de la tensión de alimentación y de las características del motor, se debe usar el capacitor que proporcione el control en la banda ideal. Este capacitor estará entre 100 y 470 nF. La corriente máxima admitida para este control es de 2 A.
En la figura 13 tenemos las formas de onda obtenidas para el control, observándose que tenemos una corriente continua pulsante.
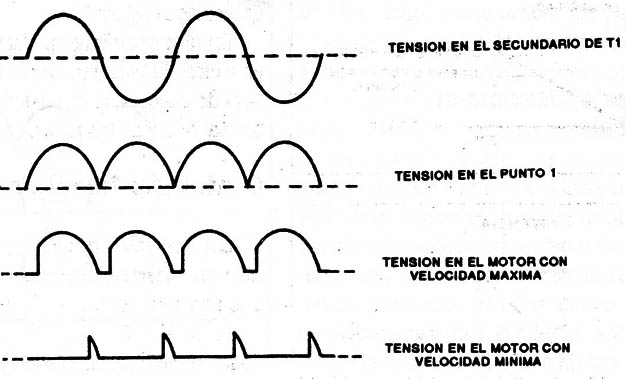
El SCR deberá ser montado en un disipador de calor y la corriente del secundario del transformador debe estar de acuerdo con el motor usado.
Partida Retardada
En realidad, este no es un control de velocidad, sino de partida. Se trata de un sistema que sólo acciona un motor después de recorrido cierto tiempo, a partir de establecida la alimentación.
Este tiempo es dado por un oscilador unijuntura, cuya constante de tiempo está dada aproximadamente por:
t = R . C
donde:
t es el tiempo de retardo, en segundos
R es el valor de la resistencia, en ohm
C es el valor dela capacitancia asociada, en farad
Haciendo R variable podemos ajustar este retardo según nuestras necesidades.
El circuito completo es el que aparece en la figura 14.
El transistor unijuntura produce un pulso de disparo después del intervalo programado, accionando el SCR que alimenta el motor.
Es importante observar que ocurre una caída de tensión del orden de 2 V en el SCR en conducción, lo que debe ser compensado en la alimentación.
Retardos de hasta más de media hora se pueden conseguir con este circuito, recordando que C1 no debe ser mayor que 1 000 µF, por motivo de las fugas, y P1 no debe sobrepasar 2M2.
Conecta/Desconectar por Pulsos
Este también es un circuito de control y no de variación de velocidad, pero puede tener muchas utilidades y hasta ser combinado con otros circuitos proporcionados en este artículo. Se trata de un sistema que permite el accionamiento de un motor por un pulso de corta duración.
Este pulso puede venir de un interruptor de presión, un reed-switch, o incluso de un relé. Para desconectar el motor, un pulso de corta duración es producido por otro interruptor, reed-switch o relé.
Se trata de una aplicación interesante para hacer inversiones de movimiento, accionamientos al final de un curso, con el pasaje de modelos, o cuando determinada posición de un objeto es detectada.
En la figura 15 tenemos el circuito completo, que funciona como un biestable con un SCR.
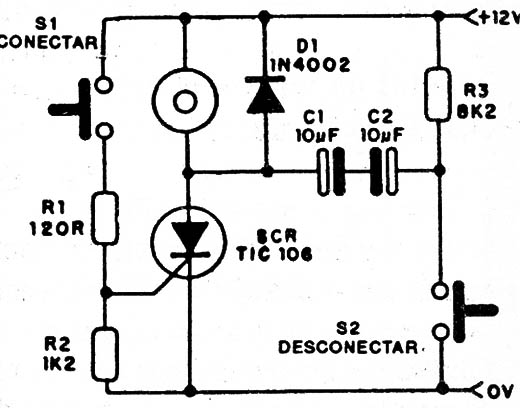
La aplicación de un pulso en el gate del SCR provoca su disparo, mientras que otro pulso cortocircuita el ánodo con el cátodo, a través de un capacitor despolarizado, desconectando el motor. El SCR soporta corrientes de hasta 2A con un buen disipador de calor y debe ser compensada la caída de tensión del orden de 2 V que ocurre en su conducción plena.
Por otro lado, los pulsos de corriente que ocurren en los interruptores son de pequeña intensidad (menores de 100 mA) posibilitando la utilización de reeds o relés de baja corriente.
Control de Potencia con SCR y Unijuntura
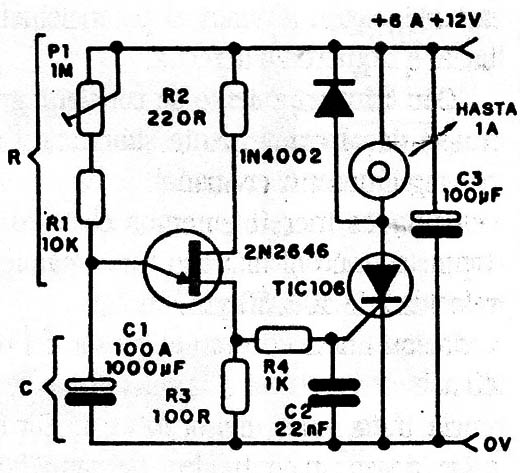
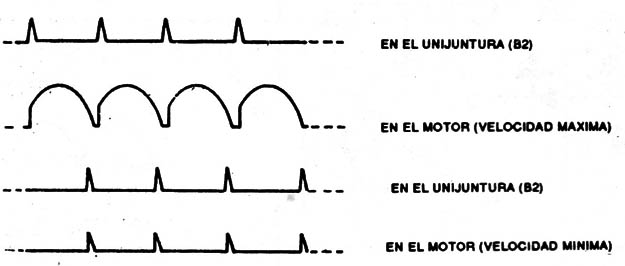
Una versión más sofisticada de control de velocidad por retardo de disparo con la fase de una corriente alterna es la que damos a continuación. En lugar de los pulsos de disparo obtenidos de una red RC variable, los mismos son generados por un oscilador de relajación con transistor unijuntura.
La frecuencia aleatoria de los pulsos generados en relación a la de la red hace que se obtenga un accionamiento medio correspondiente a la velocidad deseada, como muestran los gráficos de la fig. 16.
Un puente de onda completa nos per- mite trabajar con los dos semiciclos de la alimentación y obtener mayor rendimiento. En la figura 17 tenemos el circuito completo de este control.
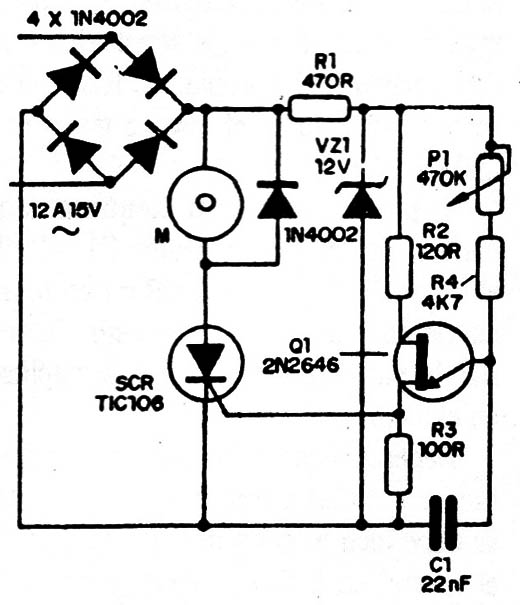
El SCR puede controlar corrientes de hasta 2 A, juntamente con los diodos elegidos ya que, siendo diodos de 1 A, sólo conducen la mitad del ciclo.
La alimentación de entrada debe ser hecha por un transformador con tensión y corriente de acuerdo con el motor a ser alimentado.
Control de Velocidad Bidireccional
Este es un control tipo reóstato, pero con una característica especial: con el potenciómetro de control en la posición central, el motor permanece parado, girando en un sentido o en el otro, con velocidad variable, según giramos el potenciômetro hacia la izquierda o derecha.
Este comportamiento se consigne gracias al uso de una fuente simétrica y de un amplificador operacional.
En la figura 18 tenemos el circuito completo del control, cuyo funcionamiento se describe a continuación.
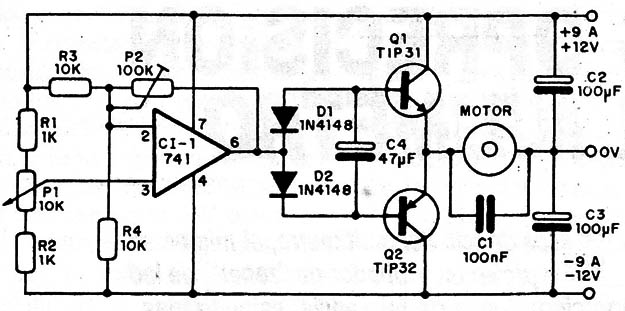
Cuando la tensión en el cursor del potenciômetro es igual a la tensión de referencia, dada por el divisor formado por R3 y R4, la tensión de salida en el amplificador operacional es cero. Tenemos, entonces, entre los dos terminales del motor una tensión nula, que corresponde al motor detenido.
Cuando giramos el cursor del potenciômetro en el sentido de aumentar la tensión en la entrada no inversora (pino 3), la tensión de salida sube proporcionalmente, polarizando Q1 en el sentido de la saturación y Q2 en el sentido del corte. El resultado es que la tensión positiva en el motor sube, haciéndolo girar.
La velocidad de subida de esta tensión con el giro del potenciômetro se ajusta en P2, que da la ganancia del operacional.
Con P2 en la posición de mínima resistencia (cero), el amplificador operacional funciona como seguidor de tensión de ganancia unitaria, caso eu que tenemos la acción más suave del control. Esta acción puede todavía ser suavizada más, con el aumento de R1 y R2 en la proporción necesaria para el control deseado.
Cuando la tensión en el cursor de P1 cae por debajo de la referencia, la salida del operacional se vuelve negativa en relación a la resistencia de 0 V, polarizando Q2 en el sentido del corte. El resultado es la aplicación de tensión negativa al motor, haciéndolo girar en sentido opuesto al obtenido anteriormente.
Los transistores de potencia usados pueden controlar fácilmente corrientes de hasta 1A, siempre que se los dote de buenos disipadores de calor, y la tensión de alimentación puede quedar en la banda de 9 a 12 V. En verdad, podemos también alimentar motores de 6V, pero éstos están en el limite inferior de la alimentación del 741.
Conclusión
El control total de un motor pequeño de corriente continua puede ser obtenido de muchas maneras, como ya vimos. En realidad, estas no son todas y existen integrados específicos para estas aplicaciones, así como circuitos estabilizadores de velocidad y otros. Sin embargo, por limitaciones de espacio, nos detenemos aquí, esperando volver en otras oportunidades con otras aplicaciones.
Revisado 2017